
Deltaroboter im Pocket-Format.
Unterschiedliche Mikromontage-Aufgaben stellen heutzutage immer grössere Herausforderungen an die Antriebstechnik. Während Mikrokomponenten und –systeme stetig kleiner werden, bleibt die Entwicklung der Produktionssysteme in makroskopischen Dimensionen oftmals zurück. Eine Westschweizer Firma hat mit einer ganzen Produktfamilie von Deltarobotern den Markt revolutioniert. Starke maxon-Motoren sorgen für hochpräzise und dynamische Bewegungen.
Asyrils Spezialität liegt in der Entwicklung und Integration von mechatronischen Systemen für eine schnelle und flexible automatische Handhabung von Kleinkomponenten beziehungsweise Kleinstbauteilen aus der Mikro-, Nano- und Biotechnologie. 2007 wurde das Unternehmen aus dem technologischen Know-how des CSEM und der CPA Gruppe vom Mikrorobotik-Spezialist Dr. Alain Codourey gegründet. Dem voraus ging die Kernfrage, ob es überhaupt möglich ist, einen Mikroroboter in der Grösse 100 x 100 x 100 mm3 zu bauen, und wie die Kinematik eines solchen Roboters idealerweise beschaffen sein sollte? Bereits vor etwa 10 Jahren erkannten Forscher am Schweizer Zentrum für Mikrotechnik und Elektronik (CSEM) die zunehmende Diskrepanz zwischen immer kleiner werdenden Mikrokomponenten und gleichbleibender Produktionssysteme. Während sich die mechanischen Strukturen eines Roboters relativ leicht miniaturisieren lassen, gilt das für Antriebe nur eingeschränkt: „Bei konventionellen Systemen bleiben die Motoren im Vergleich zur Mechanik sehr gross. Damit erweist sich auch die konventionelle Kinematik beispielsweise eines Knickarmroboters als ungeeignet, weil nach wie vor grosse Motoren in den Gelenken untergebracht werden“, erklärt Dr. Alain Codourey.
Um einen Ausweg aus dieser zunehmenden Diskrepanz zu finden, begann ein Forscherteam um den Mikrorobotik-Spezialisten Codourey am CSEM sowie an der Fachhochschule Biel mit der Suche nach Systemen, die sich weit besser fu¨r die Handhabung mikrotechnischer Bauteile eignen. „Wir kamen schliesslich zu dem Ergebnis, dass parallelkinematische Strukturen das grösste Potenzial fu¨r unsere Zielsetzung bieten“, erklärt Codourey. Mit diesem Ziel wurde zunächst die Idee des parallelkinematischen Achssystems zur Perfektion gebracht. Um fu¨r ein möglichst geringes Massenträgheitsmoment zu sorgen, sind alle Komponenten möglichst filigran und gewichtssparend ausgefu¨hrt. Ein grosser Vorteil der gewählten Delta-Konfiguration liegt darin, dass die maxon-Motoren zwar fu¨r die Bewegung der Kinematik sorgen, selbst jedoch nicht bewegt werden. Stattdessen sind diese am Stu¨tzrahmen befestigt und u¨bertragen die Bewegung direkt an die Struktur. Dieses Konstruktionsprinzip wurde in einer ganzen Produktfamilie von Delta-Robotern umgesetzt: die Modelle „Desktop Delta“, Power Delta“ und „Pocket Delta“ sind alle nach dem gleichen Prinzip aufgebaut.
Schlanke Antriebstechnik in der Mikromontage
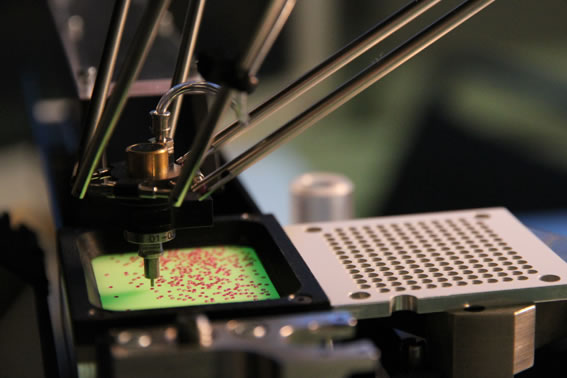
Doch nicht nur die Mechanik wurde einer Schlankheitskur unterzogen, auch bei den Antrieben selbst konnte gespart werden. Anstelle u¨berdimensionierter Motoren mit grosser Leistung und entsprechend hoher Wärmeabstrahlung werden beim Pocket Delta platzsparende Mikromotoren von maxon eingesetzt. Der Parallelmechanismus des Roboters wird mit drei EC-i 40 angetrieben, die alle an einer Platte oberhalb des Roboters angebracht sind. Damit ist die bewegte Masse sehr klein und der Roboter deshalb hochdynamisch. Für einen Pick-and-Place-Zyklus benötigt der Pocket Delta 0,33 s und schafft damit drei Zyklen pro Sekunde. In Verbindung mit der hohen Steifigkeit der kinematischen Struktur verfügt der Roboter über eine Wiederholgenauigkeit von weniger als 3 Mikrometer.
Die bu¨rstenlosen DC-Gleichstrommotoren haben einen Durchmesser von lediglich 40 mm und verfügen über eine Leistung von 50 Watt. Damit der Deltaroboter nicht nur schnell, sondern auch präzise ist, muss auch die Winkelposition des Motors sehr präzise gemessen werden. Zur Positionserfassung werden die Mikromotoren deshalb direkt mit hochauflösenden Drehgebern verbunden. Ausserdem verfügt jeder Motor über eine Feststellbremse, welche von Asyril selber konstruiert wurde. Hierbei handelt es sich um kleine Stifte, die mit einer Feder die Motorachsen halten. Diese werden während des Betriebes des Roboters mit Elektromagneten weggezogen, um die Bremse zu lösen. Die Steuerung des Roboters ist zudem vollständig im Roboter integriert und die Kommunikation wird über eine Ethernet-Schnittstelle realisiert. Der Miniroboter eignet mit seinen Eigenschaften sehr gut für das rasche Verschieben oder Zusammensetzen von Kleinkomponenten. In seiner Kategorie gilt er als einer der schnellsten und präzisesten Roboter. Ein weiterer Vorteil der gewählten Konstruktion ist, dass beim Pocket Delta auch auf ein Getriebe verzichtet werden kann.
Zur Anwendung kommt der Pocket Delta-Roboter in verschiedenen Industrien. Vor allem aber das Sortieren, Auswählen und Bearbeiten von Mikrobauteilen in der Uhrenindustrie ist seine Paradedisziplin. So ist diese Lösung zur Montage von beinahe allen Teile in einem mechanischen Uhrwerk geeignet, zum Beispiel von Schrauben, Nieten, Bolzen oder Zahnräder. Aber auch in der Medizintechnik und in der Elektronik- und Halbleiterindustrie kommt der Pocket Delta zum Einsatz. Die typische Grösse der zu bewegenden Teile liegt zwischen 0,5 und 15 Millimeter.
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}